

某校科技兴趣小组制作了一个机器人,该机器人能根据指令要求进行旋转和行走.机器人从起点出发,连续执行如下指令:机器人先向前直行bn(表示第n次行走的路程),再逆时针旋转α(0°<α≤90°),直到第一次回到起点后停止.记机器人共行走的路程为l,所走路径形成的封闭图形的面积为S.
例如:如图1,当每次直行路程均为1(即bn=1),α=60°时,机器人的运动路径为A→B→C→D→E→F→A,机器人共走的路程l=6,由图1图2易得所走路径形成的封闭图形的面积为S=332.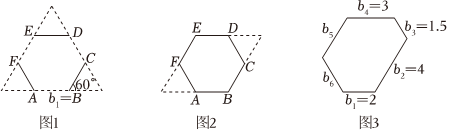
(1)若bn=1,请完成下表.
S
=
3
3
2
| α | 30° | 45° | 72° |
| l |
12 12
|
8 8
|
5 5
|
①若b1=2,b2=4,b3=1.5,b4=3,则b5=
3
3
,b5+b6=5.5
5.5
.②若b1=2,b2=4,l=20,请直接写出b3与b4之间的数量关系,并求出当S最大时b4的值.
【考点】生活中的旋转现象;规律型:数字的变化类.
【答案】12;8;5;3;5.5
【解答】
【点评】
声明:本试题解析著作权属菁优网所有,未经书面同意,不得复制发布。
发布:2024/9/22 0:0:8组卷:118引用:2难度:0.5

{kind=link}
{kind=link}