

当前位置:
知识点挑题
请展开查看知识点列表
>
<
1281.现在手机耗电越来越多,为此某品牌手机采用电池快充技术,使得充电时间大大缩短。这实现了人机关系的( )
发布:2024/12/8 23:0:1组卷:5引用:5难度:0.61282.以下操作要领和规程中,说法不正确的是( )
发布:2024/12/8 23:0:1组卷:36引用:3难度:0.51283.如图所示是农田智能灌溉系统示意图。为了提高该系统的性能,需要进一步优化。下列属于影响系统优化的因素是( )
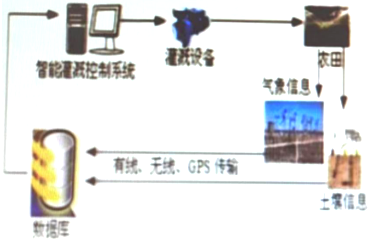 发布:2024/12/8 22:0:1组卷:1引用:1难度:0.5
发布:2024/12/8 22:0:1组卷:1引用:1难度:0.51284.如图所示的扫地机器人,由单片机、传感器、驱动电机、驱动轮、万向轮、吸尘器等部件构成,它具有自动绕开障碍物的控制功能.其工作过程是:机器人测距系统通过传感器检测行进方向有无障碍物,如果在一定距离中存在障碍物,单片机控制左右驱动电机速度差来实现转向绕行.请回答下列各题,填写横线处的相应内容.

(1)该扫地机器人转向控制系统的控制手段和控制方式分别是和(在①手动控制;②自动控制;③开环控制;④闭环控制中选择一项,填写序号).
(2)该转向控制系统的执行器是(在①吸尘器;②万向轮;③驱动电机中选择一项,填写序号).
(3)扫地机器人测距系统中的传感器一般是(在①超声波传感器;②红外线传感器;③压力传感器中选择一项,填写序号).
(4)若扫地机器人突然无法转向,以下不可能造成的原因是和(在①驱动电机故障;②家用电器发出的电磁辐射;③万向轮转动受阻;④集尘室垃圾太多中选择二项,填写序号).发布:2024/12/8 22:0:1组卷:24引用:3难度:0.3 1285.如图是车辆前轮及前叉,前轮轴用螺丝固定在前叉上,当车辆行驶在颠簸路面的时候,前轮轴的主要受力形式为( )发布:2024/12/8 22:0:1组卷:15引用:2难度:0.5
1285.如图是车辆前轮及前叉,前轮轴用螺丝固定在前叉上,当车辆行驶在颠簸路面的时候,前轮轴的主要受力形式为( )发布:2024/12/8 22:0:1组卷:15引用:2难度:0.5 1286.如图所示是一款自动感应垃圾桶,当手伸至一定距离时,垃圾桶上方的红外线感应器将侦测到的信号输入电路模块,电路模块控制电机转动,电机转动开启桶盖.当手离开后一段时间,桶盖自动关闭.下列对该控制系统的分析中不正确的是( )发布:2024/12/8 21:30:2组卷:36引用:7难度:0.5
1286.如图所示是一款自动感应垃圾桶,当手伸至一定距离时,垃圾桶上方的红外线感应器将侦测到的信号输入电路模块,电路模块控制电机转动,电机转动开启桶盖.当手离开后一段时间,桶盖自动关闭.下列对该控制系统的分析中不正确的是( )发布:2024/12/8 21:30:2组卷:36引用:7难度:0.51287.机械加工图的组成及其图样如何?
发布:2024/12/8 21:30:2组卷:4引用:1难度:0.5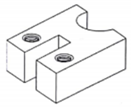 1288.用大小合适的矩形钢块,加工成如图所示的零件。加工该零件时,下列描述的加工流程中合理的是( )发布:2024/12/8 21:30:2组卷:3引用:1难度:0.5
1288.用大小合适的矩形钢块,加工成如图所示的零件。加工该零件时,下列描述的加工流程中合理的是( )发布:2024/12/8 21:30:2组卷:3引用:1难度:0.51289.2022年11月,我国神舟十五号载人飞船成功发射,该飞船采用了多项改进的技术。下列关于技术性质的理解中不恰当的是( )
发布:2024/12/8 20:30:1组卷:31引用:7难度:0.51290.在人类社会的发展过程中,为了满足人们在“衣”、“食”、“住”、“行”、“交往”等方面的需求,相应产生了许多种技术。属于满足人们在“衣”这一方面的技术是( )
发布:2024/12/8 20:30:1组卷:2引用:2难度:0.8

{kind=link}
{kind=link}